
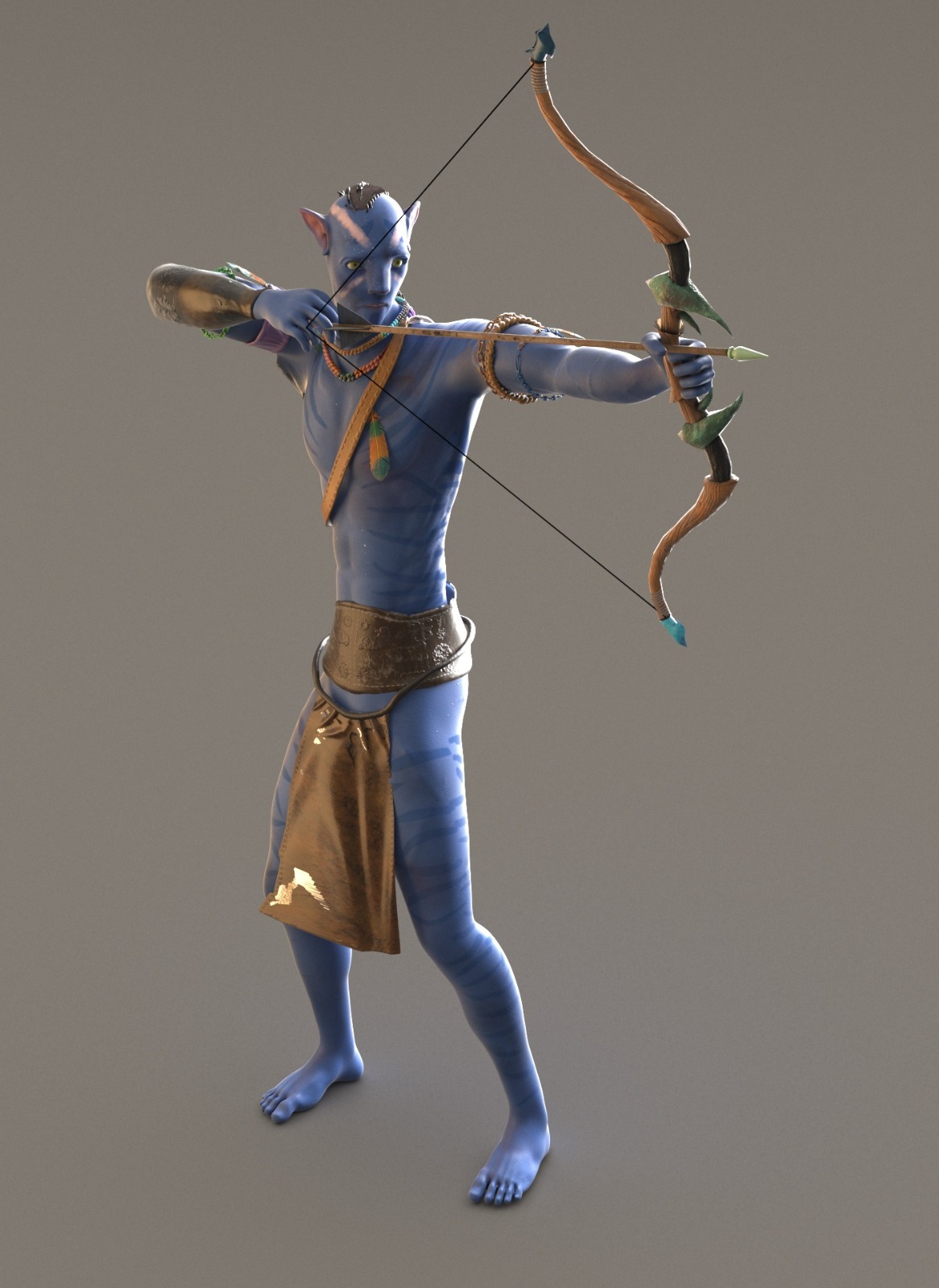
Kinematik, kuvvetler ve torklar gibi hareketin nedenini dikkate almadan hareketin incelenmesidir. Ters kinematik, bir robotun istenen bir konuma ulaşmak için hareketini belirlemek için kinematik denklemlerin kullanılmasıdır. Örneğin, otomatik çöp toplama işlemini gerçekleştirmek için, bir üretim hattında kullanılan bir robotik kolun, ilk konumdan ambarlar ve üretim makineleri arasında istenen bir konuma kadar hassas harekete ihtiyacı vardır. Bir robot kolunun kavrama ucu, son efektör olarak belirlenmiştir. Robot yapılandırması, robot modelinin konum sınırları dahilinde olan ve robotun sahip olduğu herhangi bir kısıtlamayı ihlal etmeyen eklem konumlarının bir listesidir. İstenen robotun son efektör pozisyonları verildiğinde, ters kinematik (IK), son efektörlerin hedef poza hareket ettiği uygun bir eklem konfigürasyonu belirleyebilir.

Generalist kimdir?
3D Generalist, film, oyun ve animasyon endüstrilerindeki projelerde herhangi bir kapasitede ..

Animasyonda Işığın Önemi
3B Aydınlatma, bilgisayar tarafından oluşturulan bir 3D ortamda ışığı..

3B Modelleme ne kadar zor?
3B Modellemenin temellerini öğrenmek kolaydır..

Beeple'ın dijital sanat eseri 69 milyon dolara satıldı
Rekor kıran NFT satışı, değeri gittikçe artan açık.....
Avantajlı fiyatlar ve özel indirimler için hemen iletişime geçin, burs ve özel eğitim fırsatlarını kaçırmayın.
13 Gün
14 Saat
13 Dakika
Kinematik hesaplama, robotik mühendisleri için temel bir beceridir. Ancak kinematik b..
Devamı..
3D dünyaya taşıdığınız karakterleri ve nesneleri hareketlendirmek karakter animasyonun..
Devamı..
Kinematik, kuvvetler ve torklar gibi hareketin nedenini dikkate almadan hareketin incelenmesidir...
Devamı..
Herhangi bir senaryo, hikaye, anlatı çerçevesinde gelişen olayları canlandırır..
Devamı..

Animasyon, görsel efektler ve oyun tasarımı dünyasına giriş yapmanın en etkin yolu

Temel eğitimin ardından gerçek hayat projeleri ve sektörün öncü isimleriyle birebir çalışma deneyimi

Eğitimi başarıyla tamamlayan öğrencilere doğrudan maaş ve iş garantisi














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}